豆丁网
拖拽LOGO到书签栏收藏网站
加入大会员,文档免费下
权威考研资料库,备考必看
小学数学知识点精讲汇总
登录
注册
文档
专辑
用户
建筑
合同
报告
医疗
企业工具
按相关排序
按相关
最多阅读
最新上传
全部格式
全部格式
DOC
PDF
PPT
XLS
TXT
豆单
全部页数
全部页数
1-8页
9-100页
100页以上
时间不限
全部
2024年
2023年
2022年及以前
只看优质
只看可投资
展开
排序:
相关
最多阅读
最新上传
格式:
全部
doc
pdf
ppt
xls
txt
豆单
页数:
全部
1-8页
9-100页
100页以上
时间:
全部
2024年
2023年
2022年及以前
注塑
机械手
包含3篇文档
基于注塑机的三伺服机械手的研究与开发
注塑机上下料机械手
STA 机械手
查看全部
焊接
机械手
设计
包含3篇文档
焊接机械手设计
机械手 焊接 优化设计 运动轨迹规划 仿真论文
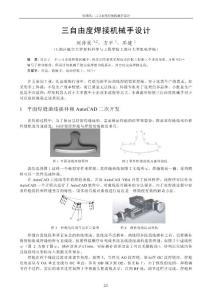
三自由度焊接机械手设计.pdf
查看全部
更多豆单结果
64
基于PLC的
机械手
自动化控制系统实现方法研究
.doc
机械工程学院机械设计制造及其自动化 机自047 0403011701 18日贵州大学本科毕业论文(设计) 随着可编程控制器应用技术的不断发展,PLC的应用范围日益扩大,使得当今工程技术人员在设计电气控
gaoweiqiang555
热度:
豆丁建筑
顶
133
收藏到书房
50
plc
机械手
毕业论文
.doc
指导老师:2010年6月摘 要机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器、传感器、等电子器件组成
五指文档
热度:
顶
11
收藏到书房
57
机械手
结构的总体方案设计
.doc
机械手结构的总体方案设计
1.3 工业机械手的用途 3
2 机械手结构的总体方案设计 4
2.1 课题的主要内容 4
2.2 课题的研究方案 4
2.3 机械手结构的总体设计 4
2.3.1 主要技术指标设计 4
2.3.2 机械手的结构设计 4
3 机械手运动学分析 6
3.1 机械手运动学方程的建立 6
3.2 运动学方程的正解 7
3.3 运动学方程的逆解 8
4 传动装置的设计 10
4.1 伺服电机及减速器的选择 10
4.1.1 机电领域中伺服电机的选择原则 10
4.1.2 旋转关节驱动电机及减速器的选择 10
4.2 链轮的设计及链条的选择 11
4.2.1 滚子链传动的设计 11
4.2.2 链轮的设计 13
4.2.3 滚子链的静强度计算 14
4.2.4 链传动的张紧 15
4.2.5 链传动的润滑 15
5 轴的设计与验算 16
5.1 轴的结构设计 16
5.1.1 选择轴的材料 16
5.1.2 初步估计轴径 17
5.2 轴的校核 18
6 轴上零件的选择与计算 25
6.1 键的选择与键联接强度校核 25
6.1.1 大臂末端电机轴上键的选择与校核 25
6.1.2 轴上矩形花键的选择与校核 26
6.1.3 小臂电机轴上键的选择与校核 26
6.2 滚动轴承的验算 26
6.2.1 确定轴承的承载能力 27
6.2.2 计算当量动载荷 28
6.2.3 校核轴承寿命 28
7 伺服进给系统的设计与计算 29
7.1 滚珠丝杠的设计 29
专业资料库
热度:
豆丁建筑
顶
22
收藏到书房
57
机械手
毕业设计论文
.doc
机械手毕业设计论文机械,设计,机械手,毕业设计,机械手设计,毕业论文,机械手论文
boocai1596
热度:
收藏到书房
51
自动搬运
机械手
总体机构设计 毕业设计
.doc
本文对自动搬运机械手进行了总体机构设计,能够完成机械手整体的旋转,机械手手臂的升降和伸缩,根据机械手的技术参数分别设计了机械手的夹持式手部结构计算出了夹持物料时手抓气缸缩需要的驱动力,设计了手臂伸缩、
项目咨询
热度:
顶
2
收藏到书房
145
武藏式
机械手
编程软件MuCAD 中文说明书
.pdf
1未经武藏工程株式会社的许可,禁止对本产品进行复制和更改。Microsoft Windows 是美国Microsoft Corporation 在美国以及其他国家的注册商标。 其他本文中记载的公司名称
w7733358
热度:
收藏到书房
50
机械手
的PLC控制
.doc
指导老师:成都电子机械高等专科学校二〇〇七年六月摘 要机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器
xiangma
热度:
顶
20
收藏到书房
233
YAMAHA
机械手
操作手册(下册)
.pdf
4-1474操作4.ArmtypeatPGMreset/ARMTYPSCARA 型机器人时,以XY 坐标系移动或变换坐标点数据的坐标时,必然会有通过右手系处理还是通过左手系处理的设定。此参数,根据程序
文档 小贼书架
热度:
顶
3
收藏到书房
51
喷漆
机械手
的PLC控制系统设计
.doc
喷漆是产品生产中的重要环节,但在传统的喷漆工艺方面,许多企业还在采用手工的方法,工人完全凭经验进行喷漆。由于工人的熟练程度和生产经验的差异,再加上疲劳程度和工作态度的影响,难以保证喷漆质量的稳定。另外
陸振棟
热度:
顶
8
收藏到书房
51
码垛
机械手
设计
.pdf
码垛机械手设计码垛机械手设计码垛机械手设计
山东孚芯通智能科技..
热度:
收藏到书房
升级豆丁大会员,13亿+文档免费下
更有在线复制文档、阅读零广告、专属客服等16项特权等你来
5万+用户已开通
1
2
3
4
5
6
7
8
9
10
11
向豆丁求助:有没有
comau机械手
?
相关搜索
comau
comau c5g
comau机器人
东南汽车 comau
柯马comau动力总成系统事业部
comau机器人堆垛效率的提升
如要投诉违规内容,请
联系我们
按需举报;如要提出意见建议,请到
社区论坛
发帖反馈。